Notion de repère
Définition :
Un repère R de l'espace (E) de dimension 3 est constitué par :
Le repère R se note R
|  |
Remarque :
Les bases et les repères utilisés en mécanique du solide sont orthonormés, c'est à dire que les vecteurs de bases sont :
deux à deux orthgonaux :
 ,
,
 et
et
 (→ "ortho")
(→ "ortho")
unitaires :
 (→ "normé")
(→ "normé")
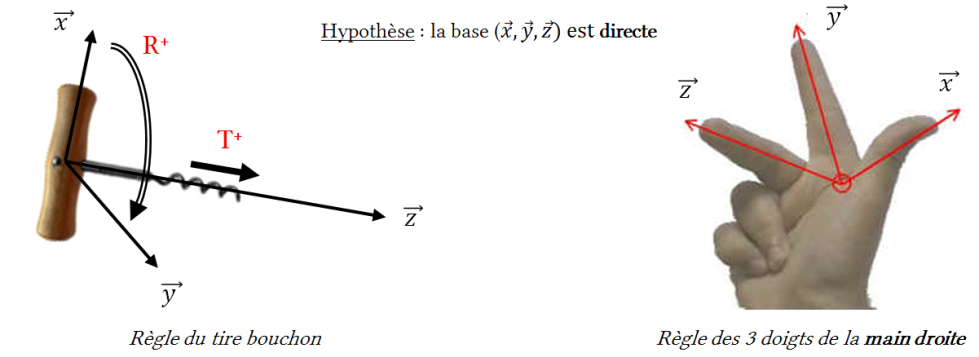
Très souvent, la base
 est directe (ou le repère
est directe (ou le repère
 est direct). Une base directe peut être idéntifiée grâce à la règle du tire-bouchon ou des 3 doigts de la main droite.
est direct). Une base directe peut être idéntifiée grâce à la règle du tire-bouchon ou des 3 doigts de la main droite.